کارگاه اجزاي
دقيق
Precise Elements Shop
45-080
مدرس
اهداف درس
در اين آزمايشگاه دانشجويان با
برخی سنسورهای اندازهگیری و طرز استفاده
از آنها در اندازهگیری پارامترهای عملکردی یک سیستم
پیشرانش هوافضایی و همچنین با سنسورهای
اينرسی که در ناوبری و کنترل وسایل پرنده استفاده میشود، شامل شتابسنج و ژیروسکوپ
و نحوه تست و کاليبراسيون آنها آشنا میشوند. سپس چگونگی استفاده از یک سیستم تعیین
وضعیت از نوع AHRS، یک سیستم تعیین موقعیت از نوع
GPS و همچنین چگونگی ترازیابی اولیه یک واحد اندازهگیری
اینرسی را فرا میگیرند. در انتها چگونگی پیادهسازی کنترلکننده یک شبيهساز
یکدرجهآزادی كوادروتور را تجربه میکنند.
برنامه درسي
1-
نحوه
استفاده از تجهیزات آزمایشگاه
در جلسه اول دانشجویان با
تجهیزات عمومی موجود در آزمایشگاه و طرز استفاده از آنها آشنایی اولیه کسب می کنند.
این تجهیزات عبارتند از: اسیلوسکوپ دیجیتالی حافظهدار، سیستم دادهبرداری، منبع
تغذیه آنالوگ و دیجیتال، مولتیمتر، میز Rate یکدرجهآزادی و میز دستی
دودرجهآزادی. همچنین در جلسه اول آزمایشهایی که در طول ترم انجام خواهد شد، به
دانشجویان معرفی میشود.
2-
اندازهگیری پارامترهای عملکردی یک سیستم پیشرانش الکتریکی
در اين آزمايش دانشجویان بهکمک
تستر موجود طرز اندازهگیری تراست، دور موتور و توان مصرفی یک سیستم پیشرانش
الکتریکی را فرا میگیرند.
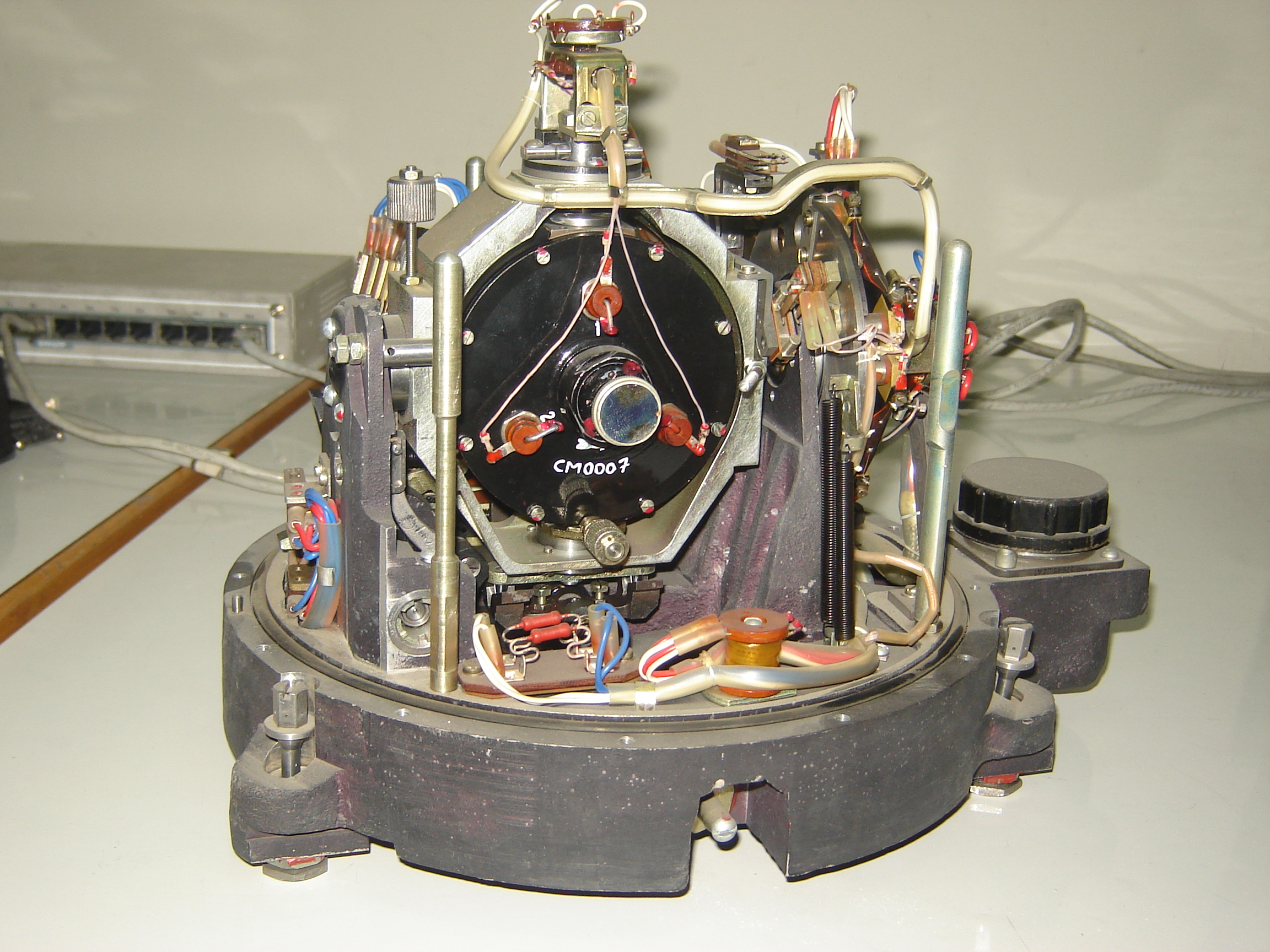
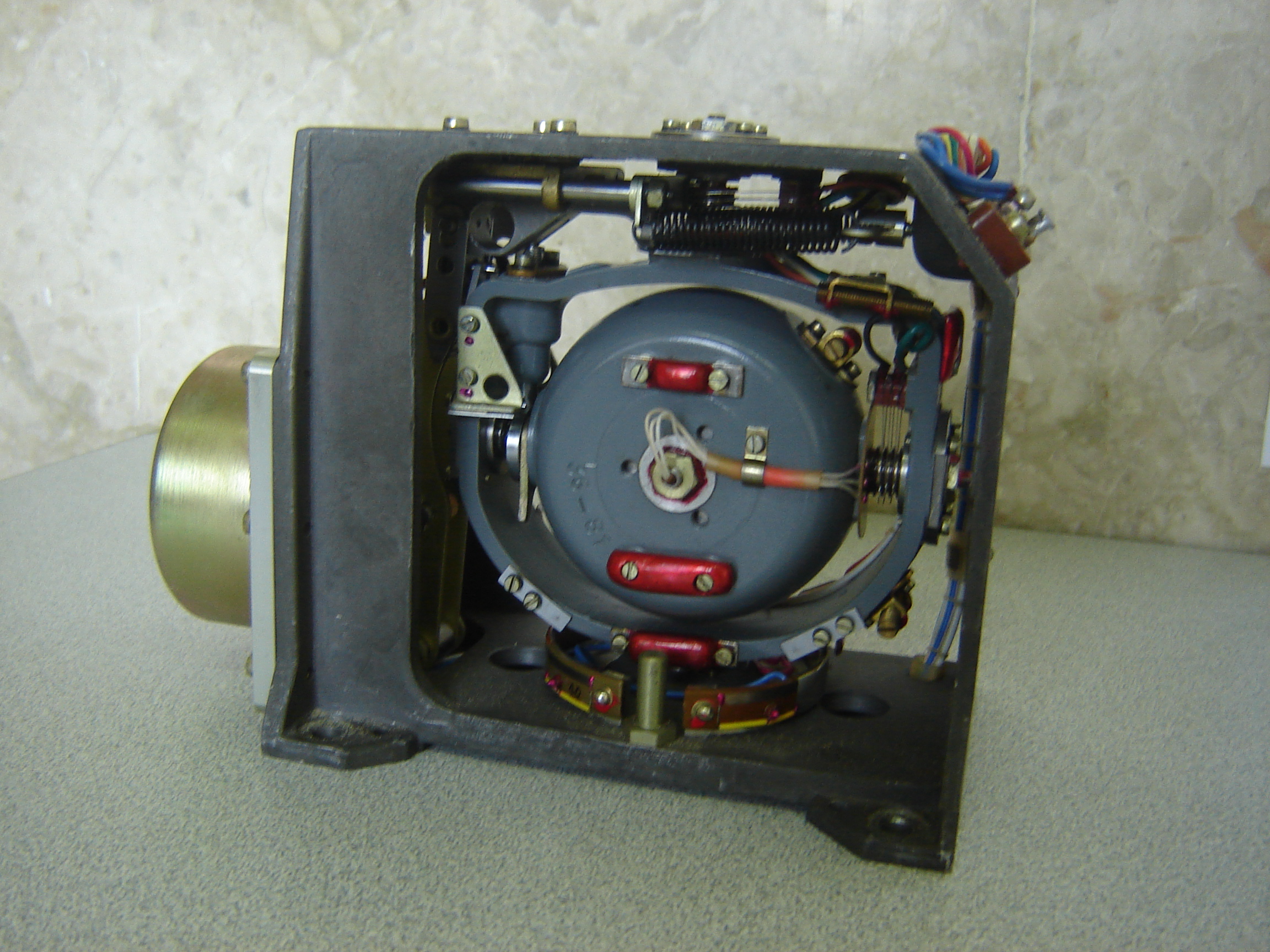
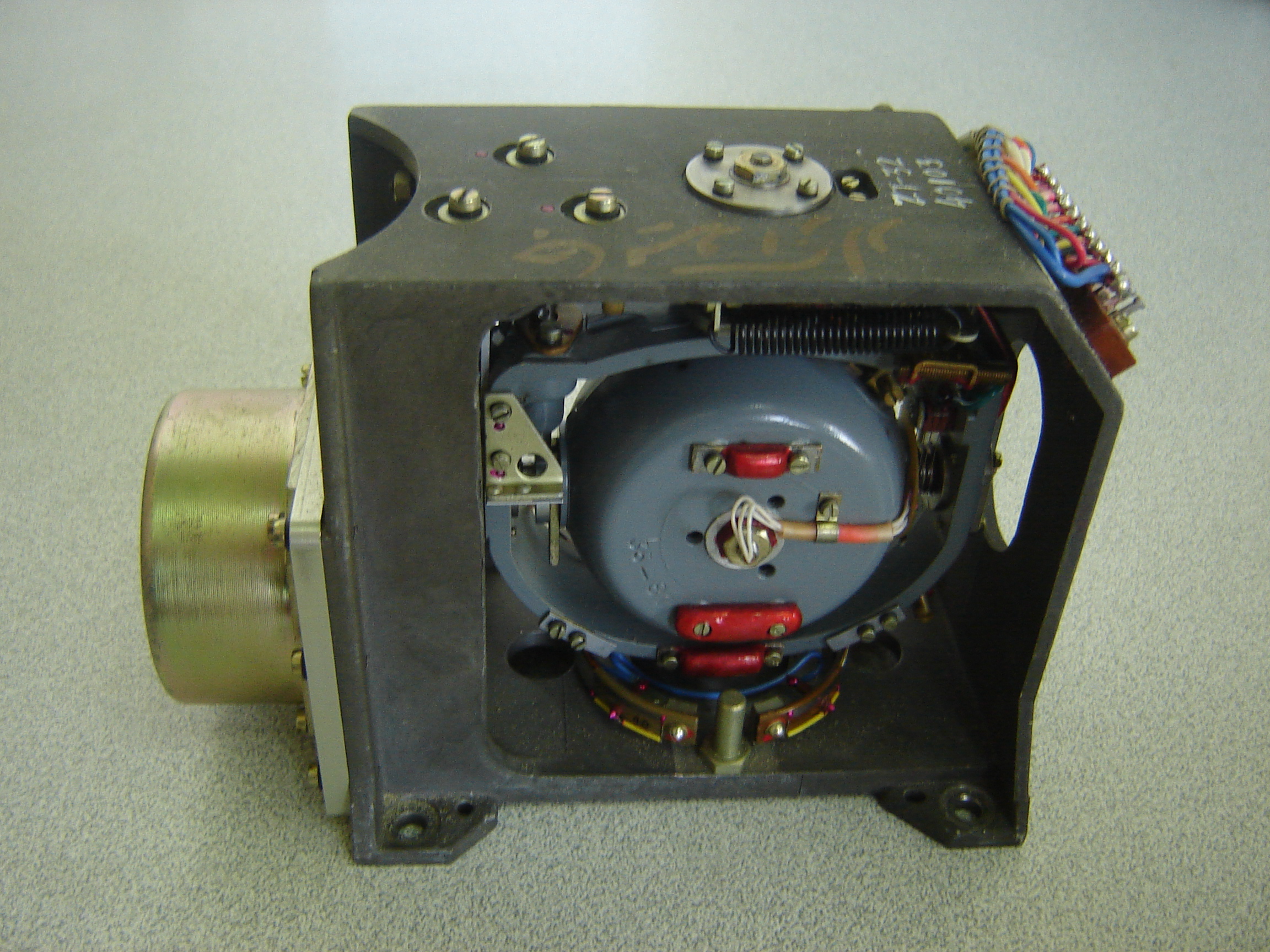
3- آشنایی
با خواص ژيروسکوپ و انواع آن
در اين آزمايش دانشجويان بهکمک
ژيروسکوپ آموزشی موجود با مفاهیم صلبيت و حرکت تقديمی آشنا میشوند و حس فيزيکی از
المان ژيروسکوپی کسب میکنند. همچنین انواع ژيروسکوپهای موجود در صنعت هوافضا و
کاربرد هر یک از آنها به دانشجویان آموخته میشود.
4-
کاليبراسيون ژيروسکوپ نرخی
در اين آزمايش با استفاده از ميز
Rate موجود مقدار باياس و ضریب مقیاس يک ژيروسکوپ نرخی اندازهگيری میشود.
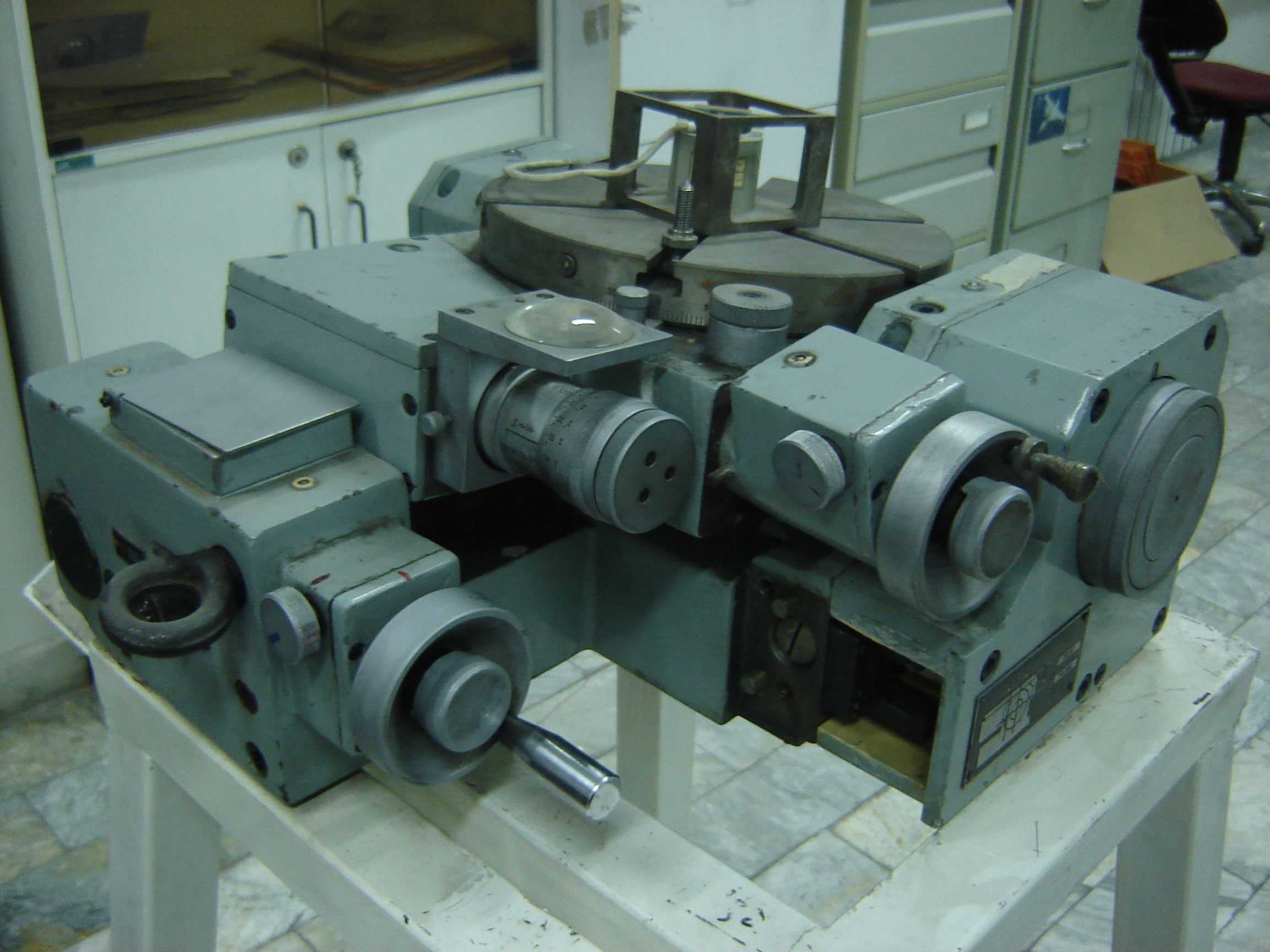
5-
کاليبراسيون ژيروسکوپ آزاد (free gyro)و اندازهگيری دریفت ناشی از شتاب جاذبه
در اين آزمايش مقدار باياس و
ضریب مقیاس يک ژيروسکوپ آزاد توسط ميز دو درجه آزادی محاسبه شده و سپس دريفت ناشی
از شتاب جاذبه زمين محاسبه میشود.
6-
کاليبراسيون شتابسنج
در اين آزمايش مقدار باياس و
ضریب مقیاس يک شتابسنج توسط ميز دو درجه آزادی و همچنين مقدار معلوم اندازه شتاب
جاذبه استخراج شده و سپس مقدار جبران نشده سرعت زاويهای حساب میشود.
7-
اندازهگيری خطاهای شتابسنج
در اين آزمايش خطاهای يک
شتابسنج توسط يک ميز دو درجه محاسبه میشوند.
8-
اندازهگیری زوایای رول، پیچ و یاو با استفاده از AHRS
در اين آزمايش دانشجويان ضمن
آشناشدن با AHRS و کاربرد آن، طرز استفاده از یک نمونه AHRS موجود در آزمایشگاه را
فرا میگیرند.
9-
ترازیابی اوليه يک سيستم ناوبری
در اين آزمايش دانشجويان با
مفهوم ترازیابی اولیه (Initial Alignment) و همچنين با روش ترازیابی اوليه با
استفاده از خروجيهای یک IMU ساده آشنا میشوند. در اين آزمايش بهعلت زياد بودن
خطاهای ژيروسکوپهای موجود در این سیستم، نرخی فقط زوايای رول و پيچ محاسبه
میگردند.
10-
اندازهگیری موقعیت با استفاده از GPS
در اين آزمايش دانشجويان ضمن
آشناشدن با GPS و کاربرد آن، طرز استفاده از یک نمونه گیرنده GPS موجود در
آزمایشگاه را فرا میگیرند.
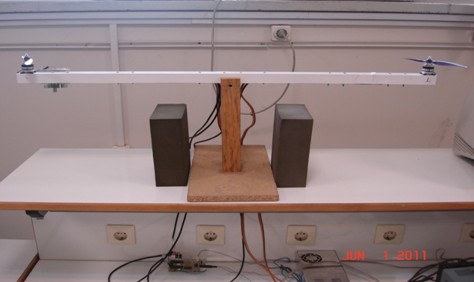
11- کنترل
زاویه رول یک شبیهساز یکدرجهآزادی کوادروتور
در اين آزمايش دانشجويان با
استفاده از مکانیزم یک درجهآزادی موجود در آزمایشگاه نحوه پیادهسازی کنترلر زاویه
رول را تجربه میکنند. در این سیستم برای کنترل زاویه رول از دو موتور الکتریکی
پروانهدار، که در دو انتهای بازو قرار گرفتهاند، استفاده میشود.
دستاوردها
با اتمام اين دوره دانشجويان
1. با انواع سنسورها آشنا شده و
طرز استفاده از آنها را یاد میگیرند.
2. با خطاهای سنسورهای اينرسی و
نحوه کاليبراسيون آنها آشنا میشوند.
3. نحوه استفاده از AHRS و GPS
را میآموزند.
4. با نحوه ترازیابی اولیه IMU
آشنا میشوند.
5. نحوه پیادهسازی کنترلکننده
را تجربه میکنند.
نمرات ترم های
قبل